Objetivo: Diseño e Implementar de un filtro pasa bajas digital de 1 orden utilizando la aproximación diferencial a partir de un filtro continuo.
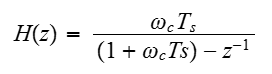
A partir de un filtro continuo pasa bajas de 1 orden
![]()
donde wc es la frecuencia de corte en radianes/segundo y usando la aproximación diferencia
![]()
se tiene la siguiente función de transferencia en z
usando los siguientes parámetros
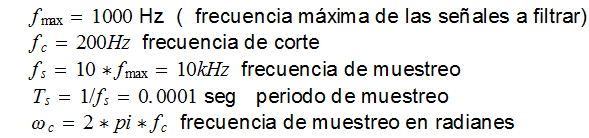
tenemos

cuya ecuación en diferencia es
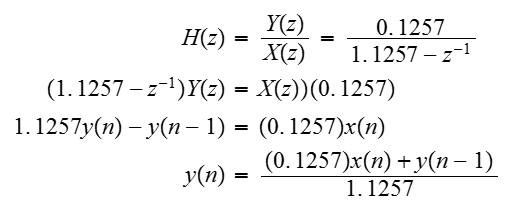
La cual tenemos que implementar en arduino
Vamos a muestrar la señal a frecuencia de 10 K Hz es decir un periodo de 100 micro segundos, para hacer un muestra cada ese tiempo vamos a usar la libreria “TimerOne.h” para generar un interrupción por tiempo cada 100 micro segundos, cada ese tiempo se ejecuta la función muestrea() que toma un valor analógico, lo convierte en digital de 10 bits, usamos la entrada actual y la salida anterior en la ecuación en diferencias para calcular y[n] y después se convierte a 12 bits y se manda al DAC MCP4921
Código
#include <DueTimer.h>
float ynant; // señal de salida anterior
void setup() {
ynant=0;
analogReadResolution(12); // Configuración de resolución
analogWriteResolution(12);
Timer3.attachInterrupt(muestrea);
Timer3.start(100);
}
void muestrea () { // se ejecuta cada 100 us
float xn=analogRead(A0); //se lee la señal analogica y se convierte en digital de 0 a 1024
float yn=(((0.1257)*xn+ynant)/(1.1257)); // ecuación en diferencias del filtro
ynant= yn;
analogWrite(DAC1, yn); // Escribir al DAC la variable valor
}
void loop() {
}
Es necesario bajar e instalar la libreria de Duetimer.h que es para el manejo de interrupciones temporales para arduino Due.
https://github.com/ivanseidel/DueTimer
Diagrama en proteus
Resultados
Si la señal de entra es de 10 Hz ( debajo de la frecuencia de corte)
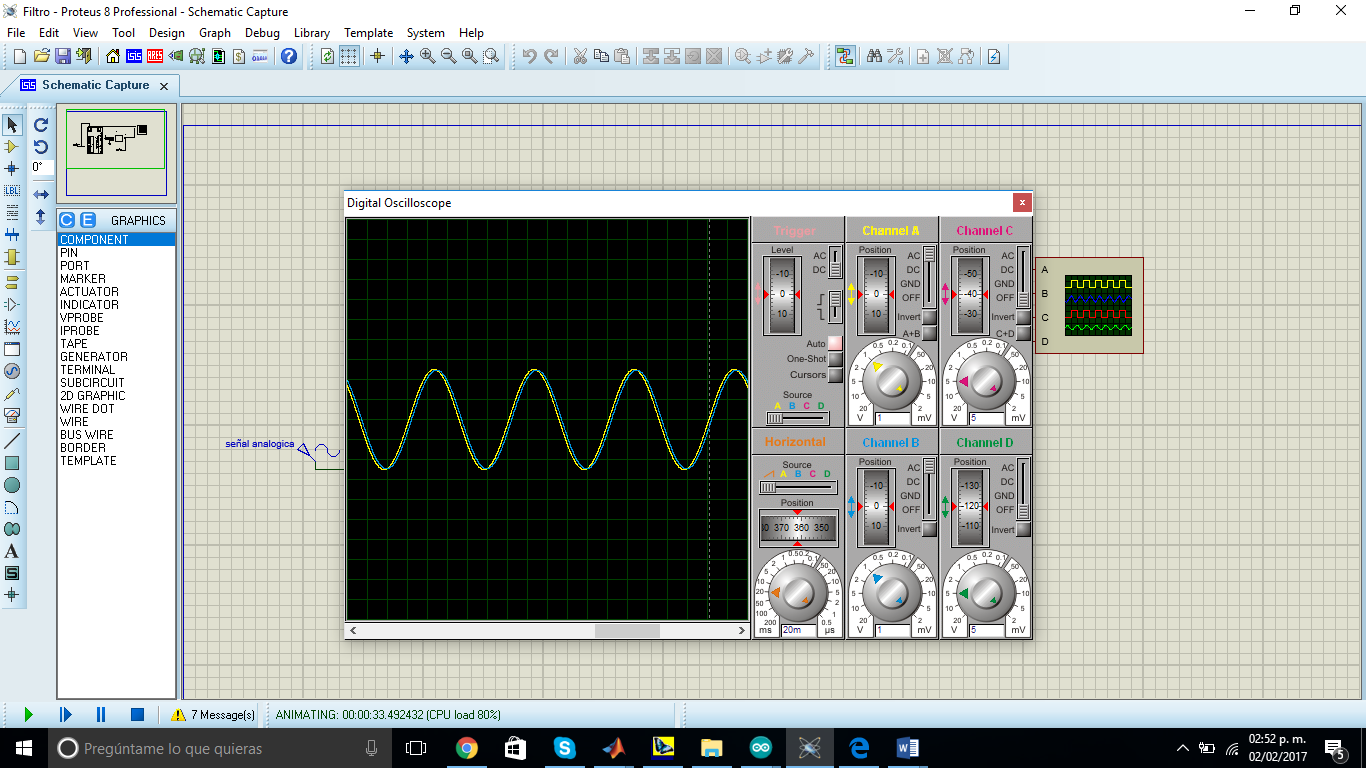
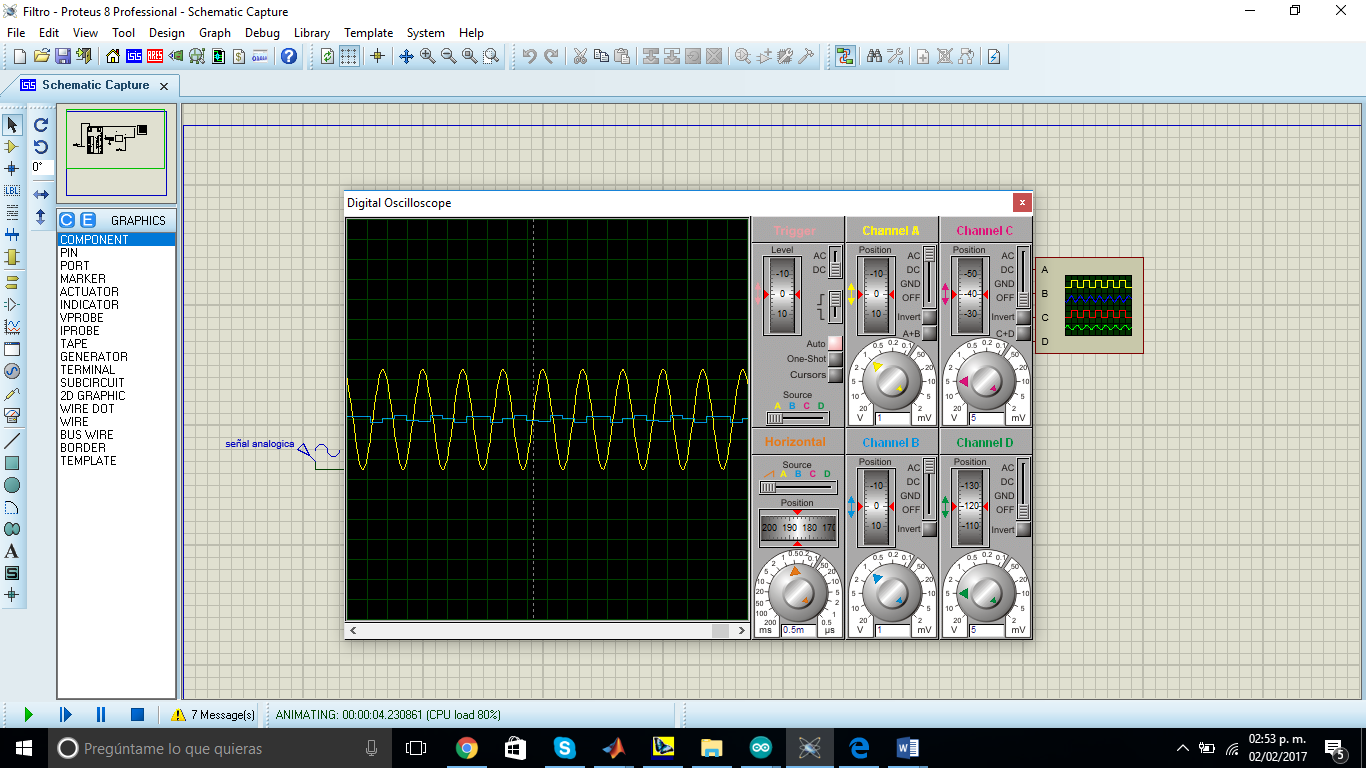
Si la señal de entra es de 200 Hz ( en la frecuencia de corte)

Si la señal de entrada es 1000Hz ( por arriba de la frecuencia de corte)



De dónde sale la aproximación diferencia?
Si 1/s = 1/(1-z^-1) entonces s = 1-z^-1.
De la definición de derivada.