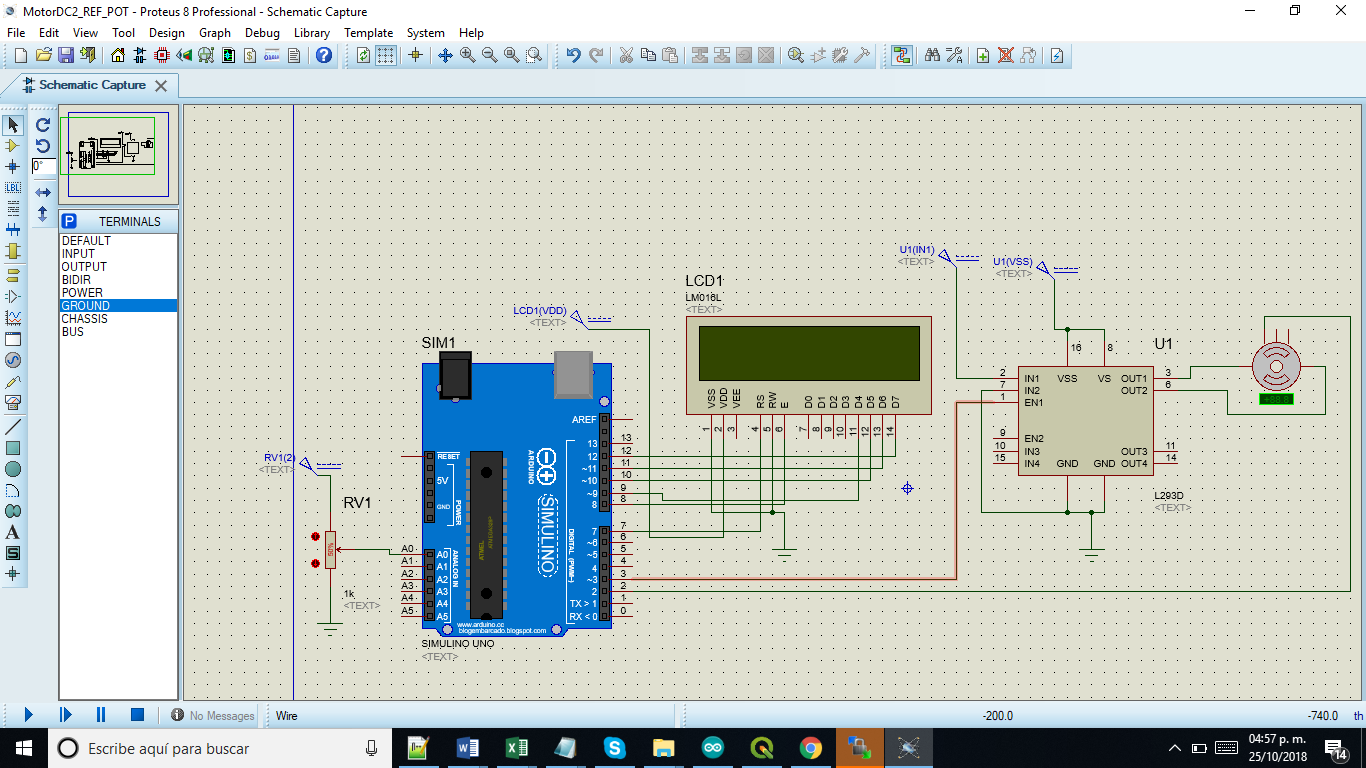
[:es]Diagrama en Proteus
Código Arduino
#include <PID_v1.h>
#include <LiquidCrystal.h>
#include "TimerOne.h"
// Desarrollado por Christian A. Vazquez para http://arduino.tecsolucion.com
int potenciometro = A0; // select the input pin for the potentiometer
int potdigital ; //
int salidaPWM = 3; // salida de señal PWM
int Interruptor = 0; // El interruptor a utilizar sera el 0 es decir el pin digital 2
long cuentat = 0;
int pulsos=0; // variable para contar los pulsos en 1 segundo
int resolucion = 24; // pulsos por revolución del encoder
//Define Variables we'll be connecting to
double rpm,Setpoint,Output;
//Specify the links and initial tuning parameters
double Kp=2, Ki=5, Kd=1;
PID myPID(&rpm, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
LiquidCrystal lcd(7,8, 9, 10, 11, 12);
//Esta seria nuestra funcion interrupcion exte.
void interrupcion_isr()
{
pulsos=pulsos+1;
}
void ISR_timer () {
cuentat=cuentat+1;
}
void setup() {
// declare the ledPin as an OUTPUT:
// Serial.begin(9600);
pinMode(salidaPWM, OUTPUT); // decimos que pinOut es salida
lcd.begin(16,2);
Timer1.initialize(1000); // Dispara cada 1000 us = 1 ms
Timer1.attachInterrupt(ISR_timer); // Activa la interrupcion y la asocia a ISR_Blink
//Adjuntamos al interruptor 0 ( pin 2 ) la funcion cambios, cuando suceda un CHANGE
attachInterrupt(Interruptor, interrupcion_isr, LOW);
Setpoint = 20; // velocidad referencia
//turn the PID on
myPID.SetMode(AUTOMATIC);
}
void loop() {
// read the value from the sensor:
potdigital = analogRead(potenciometro);
Setpoint= map(potdigital, 0, 1023, 1, 360);
// analogWrite(salidaPWM,potdigital);
myPID.Compute();
Timer1.pwm(salidaPWM, Output,1000);
// Timer1.disablePwm(salidaPWM);
// Serial.println(potdigital);
if(cuentat==1000){
rpm=((double)pulsos/resolucion)*60;
// lcd.begin(16,2); // columns, rows. use 16,2 for a 16x2 LCD, etc.
lcd.clear(); // start with a blank screen
lcd.setCursor(0,0);
lcd.print(rpm);
pulsos=0;
cuentat=0;
}
}
[:en]

Code Arduino
#include <PID_v1.h>
#include <LiquidCrystal.h>
#include "TimerOne.h"
// Desarrollado por Christian A. Vazquez par arduinomexico.com
int potenciometro = A0; // select the input pin for the potentiometer
int potdigital ; //
int salidaPWM = 10; // salida de señal PWM
int Interruptor = 0; // El interruptor a utilizar sera el 0 es decir el pin digital 2
long cuentat = 0;
int pulsos=0; // variable para contar los pulsos en 1 segundo
int resolucion = 24; // pulsos por revolución del encoder
//Define Variables we'll be connecting to
double rpm,Setpoint,Output;
//Specify the links and initial tuning parameters
double Kp=2, Ki=5, Kd=1;
PID myPID(&rpm, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
LiquidCrystal lcd(12,11, 6, 5, 4, 3);
// pin 4 de la LCD (RS)---> pin 7 del arduino (salida digital, PWM)
// pin 5 de la LCD (RW) --> GND de la breadboard (fila -)
// pin 6 de la LCD (E)--> pin 8 de la placa Arduino UNO (PWM)
// pin 11 de la LCD (D4)--> pin 9 de la placa Arduino UNO (PWM)
// pin 12 de la LCD (D5)--> pin 10 de la placa Arduino UNO (PWM)
// pin 13 de la LCD (D6)--> pin 11 de la placa Arduino UNO (PWM)
// pin 14 de la LCD (D7)--> pin 12 de la placa Arduino UNO (PWM)
//Esta seria nuestra funcion interrupcion exte.
void interrupcion_isr()
{
pulsos=pulsos+1;
}
void ISR_timer () {
cuentat=cuentat+1;
}
void setup() {
// declare the ledPin as an OUTPUT:
// Serial.begin(9600);
pinMode(salidaPWM, OUTPUT); // decimos que pinOut es salida
lcd.begin(16,2);
Timer1.initialize(1000); // Dispara cada 20 ms
Timer1.attachInterrupt(ISR_timer); // Activa la interrupcion y la asocia a ISR_Blink
//Adjuntamos al interruptor 0 ( pin 2 ) la funcion cambios, cuando suceda un CHANGE
attachInterrupt(Interruptor, interrupcion_isr, LOW);
Setpoint = 20; // velocidad referencia
//turn the PID on
myPID.SetMode(AUTOMATIC);
}
void loop() {
// read the value from the sensor:
// potdigital = analogRead(potenciometro);
// potdigital = map(potdigital, 0, 1023, 0, 255);
// analogWrite(salidaPWM,potdigital);
myPID.Compute();
Timer1.pwm(salidaPWM, Output,1000);
// Timer1.disablePwm(salidaPWM);
// Serial.println(potdigital);
if(cuentat==1000){
rpm=((double)pulsos/resolucion)*60;
// lcd.begin(16,2); // columns, rows. use 16,2 for a 16x2 LCD, etc.
lcd.clear(); // start with a blank screen
lcd.setCursor(0,0);
lcd.print(rpm);
pulsos=0;
cuentat=0;
}
}
[:]
![[:en]Libreria PID arduino[:]](https://arduino.tecsolucion.com/wp-content/themes/sociallyviral/images/nothumb-sociallyviral_related.png)




Disculpa como podria implementar 3 potenciomentros que controlaran los valores KD, KP y KI
Si, sin problema, envíame un correo a ventas@microcontroladores.com.mx
Muy buen post, muy recomendable! Saludos.
Muchas gracias que bueno que te fue útil.
disculpa que libreria es PID_v1.h? no la encuentro en el gestor de librerias como lo encuentro podrias ayudarme porfavor
Si esta si no la puedes bajar directamente de aqui
https://playground.arduino.cc/Code/PIDLibrary/
Cristian en el loop hay que descomentar alguna de las lineas?
Mándame tu código para poder ayudarte
Cristian buen día, dame una ayudita con el codigo, Mi motor no se mueve.
Con esta instruccion: analogWrite(salidaPWM,potdigital); obviamente que si se mueve, mis conexiones estan perfectas y mi driver esta perfectamente bien conectado
Envíame tu código a ventas@microcontroladores.com.mx para que lo revise. Es que en el post hay dos códigos no se cual estés usando