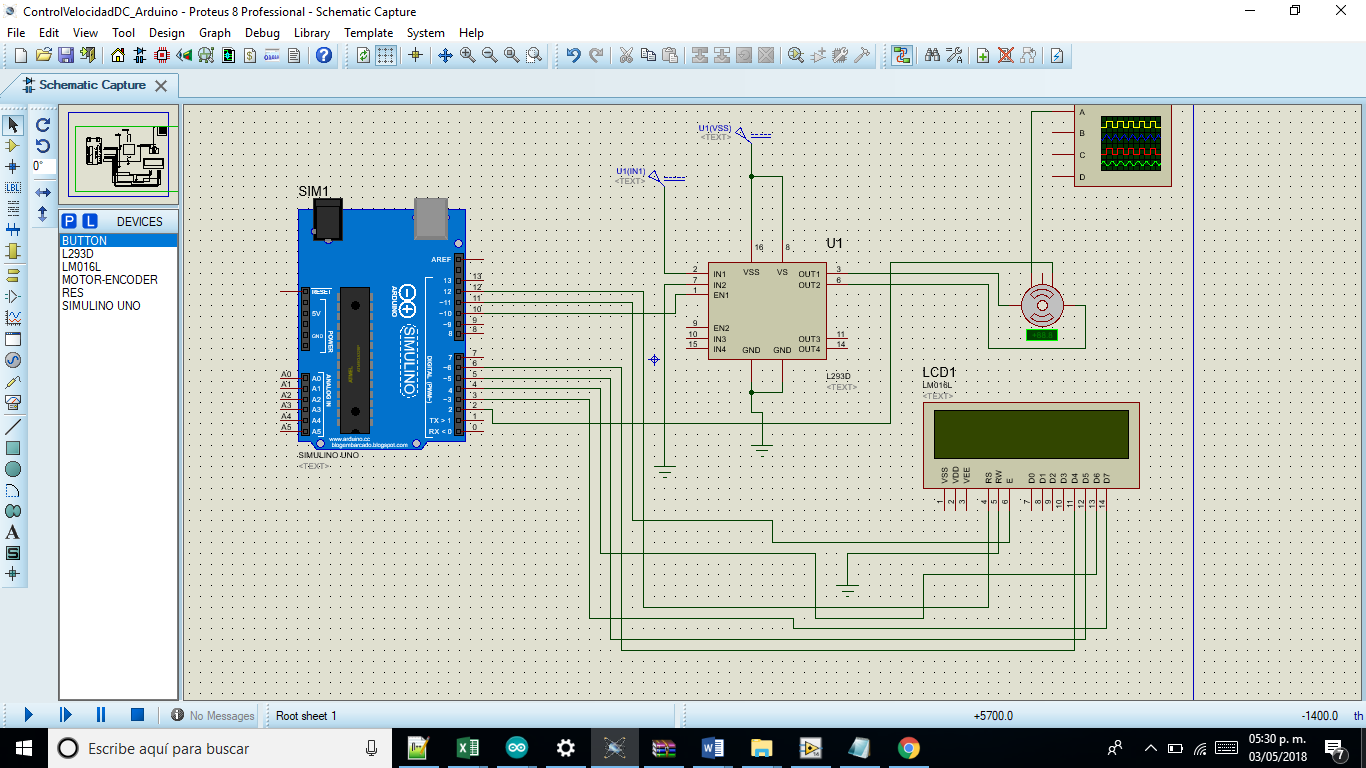
[:es]Diagrama en Proteus
Código Arduino
#include <PID_v1.h>
#include <LiquidCrystal.h>
#include "TimerOne.h"
// Desarrollado por Christian A. Vazquez par arduinomexico.com
int potenciometro = A0; // select the input pin for the potentiometer
int potdigital ; //
int salidaPWM = 10; // salida de señal PWM
int Interruptor = 0; // El interruptor a utilizar sera el 0 es decir el pin digital 2
long cuentat = 0;
int pulsos=0; // variable para contar los pulsos en 1 segundo
int resolucion = 24; // pulsos por revolución del encoder
//Define Variables we'll be connecting to
double rpm,Setpoint,Output;
//Specify the links and initial tuning parameters
double Kp=2, Ki=5, Kd=1;
PID myPID(&rpm, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
LiquidCrystal lcd(12,11, 6, 5, 4, 3);
// pin 4 de la LCD (RS)---> pin 7 del arduino (salida digital, PWM)
// pin 5 de la LCD (RW) --> GND de la breadboard (fila -)
// pin 6 de la LCD (E)--> pin 8 de la placa Arduino UNO (PWM)
// pin 11 de la LCD (D4)--> pin 9 de la placa Arduino UNO (PWM)
// pin 12 de la LCD (D5)--> pin 10 de la placa Arduino UNO (PWM)
// pin 13 de la LCD (D6)--> pin 11 de la placa Arduino UNO (PWM)
// pin 14 de la LCD (D7)--> pin 12 de la placa Arduino UNO (PWM)
//Esta seria nuestra funcion interrupcion exte.
void interrupcion_isr()
{
pulsos=pulsos+1;
}
void ISR_timer () {
cuentat=cuentat+1;
}
void setup() {
// declare the ledPin as an OUTPUT:
// Serial.begin(9600);
pinMode(salidaPWM, OUTPUT); // decimos que pinOut es salida
lcd.begin(16,2);
Timer1.initialize(1000); // Dispara cada 1000 us = 1 ms
Timer1.attachInterrupt(ISR_timer); // Activa la interrupcion y la asocia a ISR_Blink
//Adjuntamos al interruptor 0 ( pin 2 ) la funcion cambios, cuando suceda un CHANGE
attachInterrupt(Interruptor, interrupcion_isr, LOW);
Setpoint = 20; // velocidad referencia
//turn the PID on
myPID.SetMode(AUTOMATIC);
}
void loop() {
// read the value from the sensor:
// potdigital = analogRead(potenciometro);
// potdigital = map(potdigital, 0, 1023, 0, 255);
// analogWrite(salidaPWM,potdigital);
myPID.Compute();
Timer1.pwm(salidaPWM, Output,1000);
// Timer1.disablePwm(salidaPWM);
// Serial.println(potdigital);
if(cuentat==1000){
rpm=((double)pulsos/resolucion)*60;
// lcd.begin(16,2); // columns, rows. use 16,2 for a 16x2 LCD, etc.
lcd.clear(); // start with a blank screen
lcd.setCursor(0,0);
lcd.print(rpm);
pulsos=0;
cuentat=0;
}
}
[:en]

Code Arduino
#include <PID_v1.h>
#include <LiquidCrystal.h>
#include "TimerOne.h"
// Desarrollado por Christian A. Vazquez par arduinomexico.com
int potenciometro = A0; // select the input pin for the potentiometer
int potdigital ; //
int salidaPWM = 10; // salida de señal PWM
int Interruptor = 0; // El interruptor a utilizar sera el 0 es decir el pin digital 2
long cuentat = 0;
int pulsos=0; // variable para contar los pulsos en 1 segundo
int resolucion = 24; // pulsos por revolución del encoder
//Define Variables we'll be connecting to
double rpm,Setpoint,Output;
//Specify the links and initial tuning parameters
double Kp=2, Ki=5, Kd=1;
PID myPID(&rpm, &Output, &Setpoint, Kp, Ki, Kd, DIRECT);
LiquidCrystal lcd(12,11, 6, 5, 4, 3);
// pin 4 de la LCD (RS)---> pin 7 del arduino (salida digital, PWM)
// pin 5 de la LCD (RW) --> GND de la breadboard (fila -)
// pin 6 de la LCD (E)--> pin 8 de la placa Arduino UNO (PWM)
// pin 11 de la LCD (D4)--> pin 9 de la placa Arduino UNO (PWM)
// pin 12 de la LCD (D5)--> pin 10 de la placa Arduino UNO (PWM)
// pin 13 de la LCD (D6)--> pin 11 de la placa Arduino UNO (PWM)
// pin 14 de la LCD (D7)--> pin 12 de la placa Arduino UNO (PWM)
//Esta seria nuestra funcion interrupcion exte.
void interrupcion_isr()
{
pulsos=pulsos+1;
}
void ISR_timer () {
cuentat=cuentat+1;
}
void setup() {
// declare the ledPin as an OUTPUT:
// Serial.begin(9600);
pinMode(salidaPWM, OUTPUT); // decimos que pinOut es salida
lcd.begin(16,2);
Timer1.initialize(1000); // Dispara cada 20 ms
Timer1.attachInterrupt(ISR_timer); // Activa la interrupcion y la asocia a ISR_Blink
//Adjuntamos al interruptor 0 ( pin 2 ) la funcion cambios, cuando suceda un CHANGE
attachInterrupt(Interruptor, interrupcion_isr, LOW);
Setpoint = 20; // velocidad referencia
//turn the PID on
myPID.SetMode(AUTOMATIC);
}
void loop() {
// read the value from the sensor:
// potdigital = analogRead(potenciometro);
// potdigital = map(potdigital, 0, 1023, 0, 255);
// analogWrite(salidaPWM,potdigital);
myPID.Compute();
Timer1.pwm(salidaPWM, Output,1000);
// Timer1.disablePwm(salidaPWM);
// Serial.println(potdigital);
if(cuentat==1000){
rpm=((double)pulsos/resolucion)*60;
// lcd.begin(16,2); // columns, rows. use 16,2 for a 16x2 LCD, etc.
lcd.clear(); // start with a blank screen
lcd.setCursor(0,0);
lcd.print(rpm);
pulsos=0;
cuentat=0;
}
}
[:]
![[:en]Libreria PID arduino[:]](https://arduino.tecsolucion.com/wp-content/themes/sociallyviral/images/nothumb-sociallyviral_related.png)

Hola buenos dias, las salida para el motor no estan declaradas, como conect el motor?
Si, la salida 10 del Arduino es una salida PWN y vhttp://proyectosarduino.xyz/wp-admin/edit-comments.php#comments-forma conectada un Enable del L293 y este a su vez esta conectado con el Motor
Hola cómo sería el código si quiero colocar el setpoint con el potenciómetro?
Deja trabajo en un nuevo código y lo subo
disculpa tengo una pequeña duda el potenciometro va conectado al pin A0 verdad..??
y con eso podre variar la velocidad del motor verdad.?
y la pantalla me ayuda a ver a que velocidad de giro esta yendo.?
gracias de antemano
espero tu respuesta
Si va conectado ahí, saludos, tendrías que des-comentar las lineas
potdigital = analogRead(potenciometro);
y agregar la linea
Setpoint = map(potdigital, 0, 1023, 1, 100);
Para variar el setpoint de 1 a 100 ( eso rango tu lo escoges )
Buenas días, ¿Haces uso de la librería #include “TimerOne.h”?
Y si haces uso ¿Dónde la puedo descargar?
Estimado Aldo Guzman la puedes descargar de
https://code.google.com/archive/p/arduino-timerone/downloads
Excelente tu ejemplo
Gracias, quedo a tus ordenes
Pregunto porque dices que Timer1.initialize(1000) dispara cada 20 ms, no sera mas bien 1000 microsegundos? 1 segundo
Es correcto el comentario era de otro programa, gracias por la observación si son 1000 us
Disculpa no tienes salidas de giro del motor en el sketch de arduino?
No pero se le puede agregar fácilmente
Usar dos salidas digitales para conectarse al Driver ld293 1n1 y 1n2 para controlar el giro
Usar una entrada digital para un interruptor si es 0 gira en un sentido y si es 1 en otro sentido
if (digitalRead(2)==HIGH){
digitalWrite(4,HIGH);
digitalWrite(5,LOW);
} else {
digitalWrite(4,LOW);
digitalWrite(5,HIGH);
}
Hola! una pregunta para que estas leyendo o para que tienes la variable del potenciometro?
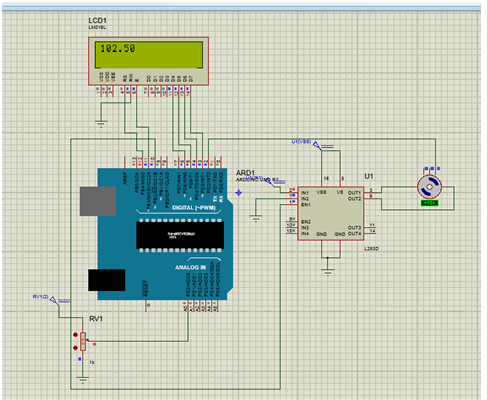
La idea es que con el potenciometro se pueda controlar el setpoint , voy a subir un código mejorado
Hola! una pregunta para que estas leyendo o para que tienes la variable del potenciometro?
En este caso no uso el potenciometro, pero se puede usar para cambiar la velocidad de referencia
Saludos
En este caso no uso el potenciometro, pero se puede usar para cambiar la velocidad de referencia
Saludos
Ya agregue una imagen al articulo
Saludos
Buenas noches Christian quiero hacer un proyecto pero soy muy malo en la programacion en arduino y para entender la libreria PID que es lo que necesito para llevarlo a la practica del proyecto me queda muy mal, ademas buscando en muchos sitios en internet no hay material que ayude concretamente y las personas que tienen el conocimiento no estan dispuestas en ayudar, pero al mirar esta publicacion y las preguntas y respuestas me doy cuenta que tienes el conocimiento y la buena voluntad en ayudar si es que puedes ofrecerme esa tremenda ayuda estaria eternamente agradecido, mi correo es aaron_zarate1990@hotmail.com y mi numero de whatsapp +595982297095 si puedes entrar en contacto conmigo para poder ayudarme estaria muy agradecido
Estimado Aaron Zarate, apenas estoy leyendo tu mensaje. Si claro te puedo ayudar voy a subir un codigo mejorado para el control PID.
¿Que necesitas?
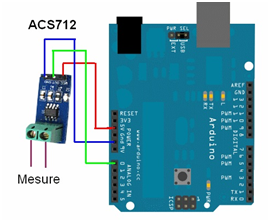
Disculpa cuánto es la alimentación de IN1 y VSS, 3.3V o 5V?
Es de 5 V, Saludos
Se puede sustituir el l293d por el l298?que modificaciones se tienen que realizar si se puede adaptar?
Si se puede remplazar sin problema, de hecho es mejor por que soporta mas corriente. En unos días subo el diseño con el L298
Hola, sabes qué tipo de motor con encoder debo usar para esto o que se necesita en el encoder para esta conexión?
Existen varios motores con encoder en mercadolibre o en amazon https://articulo.mercadolibre.com.mx/MLM-681181064-motor-de-engranaje-con-encoder-12v-dc-140-rpm-_JM#position=2&search_layout=stack&type=item&tracking_id=34620ace-a097-42e3-977f-0bfc3477a1e1